Simulating Nanorobots in Fluids with Low Reynolds Number
Adriano Cavalcanti1 and Tad Hogg*, 2
1CS Dept., Darmstadt Univ. of Technology
2HP Labs
Palo Alto, CA 94304 USA
This is an abstract
for a presentation given at the
11th
Foresight Conference on Molecular Nanotechnology
Developing nanoscale robots (nanorobots) presents difficult fabrication and control challenges [7]. Of particular interest are medical applications of such robots [4], which include operating in fluid microenvironments in the body. While such robots cannot yet be fabricated, theoretical and simulation studies identify plausible designs and capabilities [3,4].
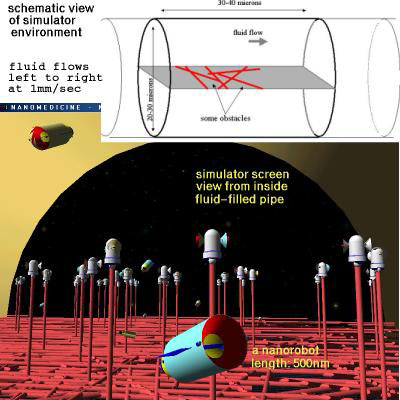 To aid investigation of system-level control algorithms for these robots, we present a physically-based simulator for nanorobots. We use a typical set of design parameters [4] for robots operating in a simplified fluid environment motivated by medically relevant microenvironments. The simulator treats the robots as simple geometric objects able to move through fluid dominated by viscous forces. This motion, characterized by a low Reynolds number, has behaviors quite different from common experience with larger, faster flows [6]. The simulation also includes diffusion, from Brownian motion, so objects do not precisely follow the laminar flow of the fluid. The simulator does not explicitly model internal mechanisms of the robots. To aid investigation of system-level control algorithms for these robots, we present a physically-based simulator for nanorobots. We use a typical set of design parameters [4] for robots operating in a simplified fluid environment motivated by medically relevant microenvironments. The simulator treats the robots as simple geometric objects able to move through fluid dominated by viscous forces. This motion, characterized by a low Reynolds number, has behaviors quite different from common experience with larger, faster flows [6]. The simulation also includes diffusion, from Brownian motion, so objects do not precisely follow the laminar flow of the fluid. The simulator does not explicitly model internal mechanisms of the robots.
The dominance of viscosity allows simplifying the physics by ignoring inertial effects. This approximation considerably simplifies the simulator as is the case with other robot simulation studies where motions are slow enough to ignore inertia [1,2]. As with this prior work, this simplification allows us to focus on overall behaviors of groups of robots, maintain a reasonable approximation to important physical phenomena of the environment and limit the computational cost of the simulator.
By incorporating an efficient collision detection algorithm based on hierarchical bounding boxes, the simulator can follow the behavior of tens of robots with sizes on the order of hundreds of nanometers over periods up to a second or so with reasonable computational effort. The simulator provides graphical visualization of object motions in the task environment, which is useful both to illustrate robot behaviors and identify difficulties with specific robot control algorithms.
We illustrate the simulator for a simple task: robots finding biomolecules moving in the fluid, and bringing them to specific target locations in their environment. Although control techniques for such foraging tasks have been developed for large scale robots [5], the physical properties of the fluid microenvironment of nanorobots provide new control challenges.
References
[1] H. Bojinov et al., "Multiagent Control of Modular Self-Reconfigurable Robots", Artificial Intelligence 142:99-120 (2002)
[2] A. Cavalcanti and R. A. Freitas Jr., "Autonomous Multi-Robot Sensor-Based Cooperation for Nanomedicine", Intl. J. of Nonlinear Sciences and Numerical Simulation, 3(4):743-746 (2002)
[3] K. E. Drexler, Nanosystems, Wiley 1992
[4] R. A. Freitas Jr., Nanomedicine, vol. 1, Landes Bioscience, 1999
[5] M. Mataric, "Minimizing Complexitiy in Controlling a Mobile Robot Population" in Proc. 1992 IEEE Intl. Conf. on Robotics and Automation, pp. 830-835.
[6] E. M. Purcell, "Life at Low Reynolds Number", American Journal of Physics, 45:3-11 (1977)
[7] A. A. G. Requicha, "Nanorobots, NEMS and Nanoassembly", to appear in Proc. of IEEE special issue on Nanoelectronics and Nanoprocessing
*Corresponding Address:
Tad Hogg
HP Labs
1501 Page Mill Road
Palo Alto, CA 94304 USA
Phone: 650 857 2519 Fax: 650 852 8156
Email: [email protected]
Web: http://www.hpl.hp.com/shl/people/tad
|